

Multi-Vehicle Control
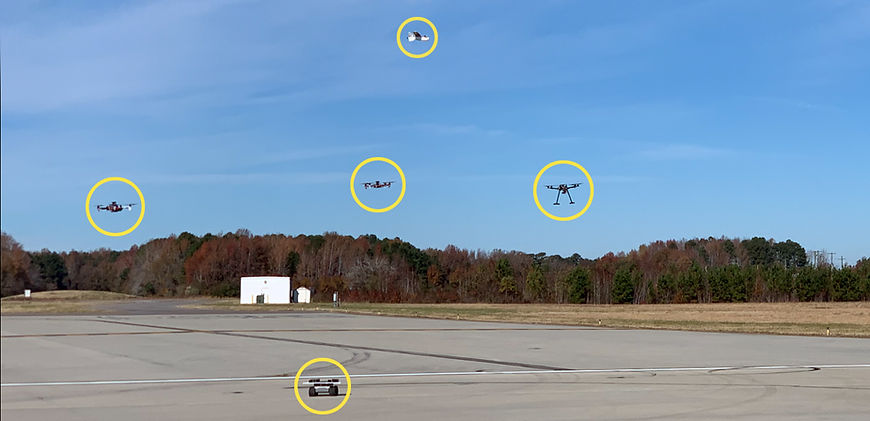
Autonodyne’s software has been specifically designed to support multi-ship collaborative autonomous operations and we've been conducting multi-ship operations since 2016. Multi-vehicle operations enable "asymmetric autonomy" in which extremely inexpensive vehicles, sensors, or payloads can be used to defeat much more expensive adversary systems or inexpensively replace/augment teams of humans. This approach permits dissimilar UVs to communicate with each other to perform swarm-like behaviors. While multiple architectures are possible to enable these capabilities, to date, we’ve implemented an IP-based mesh network architecture that supports n>>1 swarming where every vehicle, mission computer, and control station is a node in the network. Under the watchful eye of a single human operator using a mobile device to interact with the swarm, we routinely operate 15 dissimilar UVs simultaneously and have had success with 30 actual UVs and 100+ virtual UVs. We're currently working to scale this to 1000's of UVs. We have designed this swarm control to support concepts such as swarm interoperability where the entire swarm or subsets of the swarm are handed off to other control nodes while still inflight. This allows transfer of control or mission data between various commanders, services, and/or coalition partners and works well with the concept of Joint All Domain Command & Control (JADC2). The collaborative formation works as a distributed collective to find targets, reassign formation roles if required, and share various forms of sensor-acquired data while also coordinating arrival times. Allowing dissimilar vehicles to work together is a cornerstone of our autonomous flight technologies.