

Steuerung mehrerer Fahrzeuge/ Schwärmen
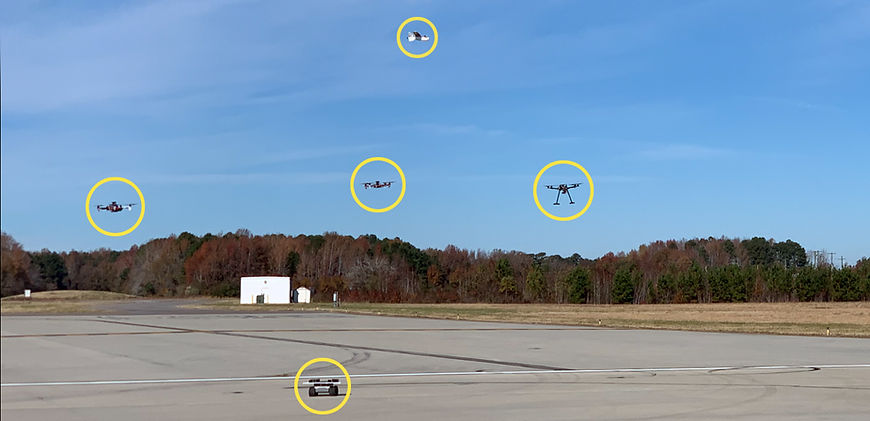
Die Software von Autonodyne wurde speziell für die Unterstützung kollaborativer autonomer Operationen mit mehreren Schiffen entwickelt und wir führen seit 2016 Operationen mit mehreren Schiffen durch. Operationen mit mehreren Fahrzeugen ermöglichen eine „asymmetrische Autonomie“, bei der äußerst kostengünstige Fahrzeuge, Sensoren oder Nutzlasten verwendet werden können, um viel teurere Gegnersysteme zu besiegen oder Menschenteams kostengünstig zu ersetzen/zu verstärken. Dieser Ansatz ermöglicht es unterschiedlichen UVs, miteinander zu kommunizieren und schwarmähnliche Verhaltensweisen auszuführen. Während mehrere Architekturen möglich sind, um diese Funktionen zu ermöglichen, haben wir bisher eine IP-basierte Mesh-Netzwerkarchitektur implementiert, die n>>1 Swarming unterstützt, wobei jedes Fahrzeug, jeder Missionscomputer und jede Kontrollstation ein Knoten im Netzwerk ist. Unter dem wachsamen Auge eines einzelnen menschlichen Bedieners, der über ein mobiles Gerät mit dem Schwarm interagiert, betreiben wir routinemäßig 15 unterschiedliche UVs gleichzeitig und hatten Erfolg mit 30 tatsächlichen UVs und über 100 virtuellen UVs. Wir arbeiten derzeit daran, dies auf Tausende von UV-Strahlen zu skalieren. Wir haben diese Schwarmsteuerung entwickelt, um Konzepte wie die Schwarminteroperabilität zu unterstützen, bei der der gesamte Schwarm oder Teilmengen des Schwarms noch während des Flugs an andere Steuerknoten übergeben werden. Dies ermöglicht die Übertragung von Kontroll- oder Missionsdaten zwischen verschiedenen Kommandanten, Diensten und/oder Koalitionspartnern und funktioniert gut mit dem Konzept des Joint All Domain Command & Control (JADC2). Die kollaborative Formation arbeitet als verteiltes Kollektiv, um Ziele zu finden, die Formationsrollen bei Bedarf neu zuzuweisen, verschiedene Formen sensorisch erfasster Daten auszutauschen und gleichzeitig die Ankunftszeiten zu koordinieren. Die Zusammenarbeit unterschiedlicher Fahrzeuge ist ein Eckpfeiler unserer autonomen Flugtechnologien.