

Contrôle multi-véhicules / essaimage
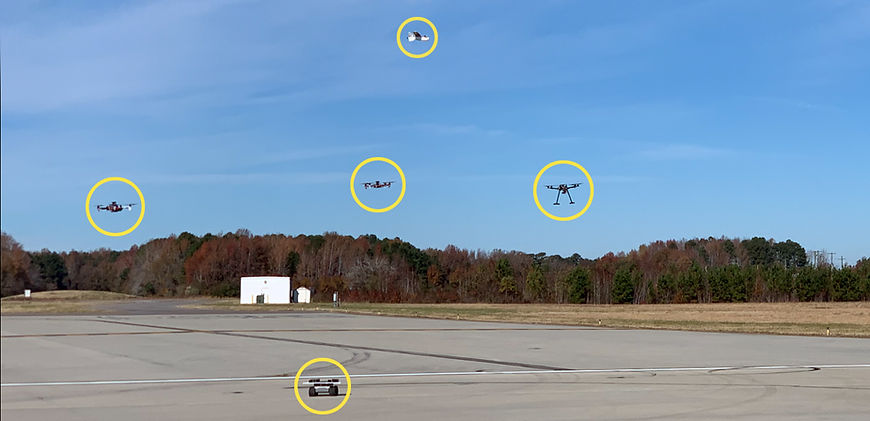
Le logiciel d'Autonodyne a été spécialement conçu pour prendre en charge les opérations autonomes collaboratives multi-navires et nous menons des opérations multi-navires depuis 2016. Les opérations multi-véhicules permettent une « autonomie asymétrique » dans laquelle des véhicules, des capteurs ou des charges utiles extrêmement peu coûteux peuvent être utilisés pour vaincre des systèmes adverses beaucoup plus coûteux ou pour remplacer/augmenter à peu de frais des équipes humaines. Cette approche permet à des UV différents de communiquer entre eux pour adopter des comportements semblables à ceux d’un essaim. Bien que plusieurs architectures soient possibles pour activer ces capacités, à ce jour, nous avons implémenté une architecture de réseau maillé basée sur IP qui prend en charge l’essaimage n>>1 où chaque véhicule, ordinateur de mission et station de contrôle est un nœud du réseau. Sous l’œil vigilant d’un seul opérateur humain utilisant un appareil mobile pour interagir avec l’essaim, nous exploitons régulièrement 15 UV différents simultanément et avons réussi avec 30 UV réels et plus de 100 UV virtuels. Nous travaillons actuellement à l'étendre à des milliers d'UV. Nous avons conçu ce contrôle d'essaim pour prendre en charge des concepts tels que l'interopérabilité des essaims, dans lesquels l'ensemble de l'essaim ou des sous-ensembles de l'essaim sont transmis à d'autres nœuds de contrôle alors qu'ils sont encore en vol. Cela permet le transfert de données de contrôle ou de mission entre divers commandants, services et/ou partenaires de la coalition et fonctionne bien avec le concept de commandement et de contrôle interarmées dans tous les domaines (JADC2). La formation collaborative fonctionne comme un collectif distribué pour trouver des cibles, réaffecter les rôles de formation si nécessaire et partager diverses formes de données acquises par les capteurs tout en coordonnant les heures d'arrivée. Permettre à des véhicules différents de fonctionner ensemble est la pierre angulaire de nos technologies de vol autonome.